某小组同学利用如图所示的装置测定重力加速度g.A为装有挡光片的钩码,总质量为M,挡光片的挡光宽度为b,细绳一端与A相连,另一端跨过定滑轮与质量为m(m<M)的重物B相连.他们的做
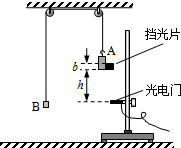
某小组同学利用如图所示的装置测定重力加速度g.A为装有挡光片的钩码,总质量为M,挡光片的挡光宽度为b,细绳一端与A相连,另一端跨过定滑轮与质量为m(m<M)的重物B相连.他们的做法是:先用力拉住B,保持A、B静止,测出A的挡光片下端到光电门的距离h;然后由静止释放B,A下落过程中经过光电门,光电门可测出挡光片的挡光时间t,算出挡光片经过光电门的平均速度,将其视为A下落h时的速度.
(1)在A从静止开始下落h的过程中,A、B组成系统的动能的增量为___;计算重力加速度g的表达式为___;
(2)由于光电门所测的平均速度与物体A下落h时的瞬时速度间存在一个差值△v,重力加速度的测量值___真实值(选填“大于”或“小于”);
(3)为消除上述△v对测量结果的影响,某同学想利用多组实验数据绘制直线的斜率来测定重力加速度.他多次改变A下落的初始位置,测出多组相应的h和t,则___
(A)绘制 -h关系图象可消除△v的影响
(B)绘制 - 关系图象可消除△v的影响
(C)绘制 -h关系图象可消除△v的影响
(D)以上关系图象均不能消除△v的影响.
答案和解析
(1)A通过光电门的瞬时速度
v=,则系统动能的增加量为:△Ek=(M+m)()2,
根据机械能守恒有:(M-m)gh=(M+m)()2,解得:g=.
(2)本题中利用平均速度代替瞬时速度,由于平均速度等于中间时刻的瞬时速度,可知测量速度大于下降h高度时的速度,则重力加速度的测量值大于真实值.
(3)根据机械能守恒有:(M-m)gh=(M+m)()2,实验中用表示下落h时的速度,而测量的速度大于实际速度,通过绘制-h图线、-h图线、-图线都不能消除△v的影响.故选:D.
故答案为:(1)(M+m)()2,g=,(2)大于(3)D
已知正方形ABCD中,E为对角线BD上一点,过E点作EF⊥BD交BC于F,连接DF,G为DF中点, 2020-05-13 …
如图:在平行四边形ABCD中,E、F分别是AD、BC的中点,连接AF、BE交于点G,连接CE、DF 2020-05-15 …
已知e为平行四边形abcd中dc边延长线上一点,且ce=dc,连ae分别交bc bd于f g,连已 2020-05-16 …
如图,已知正方形ABCD,E为对角线AC上一动点,连BE,EG,GE垂直BE,交CD于G,连BG交 2020-06-15 …
等腰直角三角形ABC中,AB=BC,∠ABC=90°,点E在BC的延长线上,点F在CB的延长线上, 2020-06-27 …
如图所示,在光滑水平桌面上有一光滑小孔O,一根轻绳穿过小孔,一端连接质量为m=1kg的小球A,另一 2020-07-10 …
实分析的一道证明题:(都在R中)若f,g连续求证1:S={x∈[0,1]|f(x)=g(x)}是紧 2020-07-25 …
设函数f(x)和g(x)在点x0(x0中的0是下标)处不连续,而函数h(x)在点x0连续,则下列哪 2020-07-29 …
“强连通分支算法”相关证明证明:在强连通分支算法中,选择任何顶点做起始点来执行深度优先搜索遍历,得到 2020-12-21 …
无向简单图G是棵树,当且仅当().A.G连通且边数比结点数少1B.G连通且结点数比边数少1C.G的边 2020-12-27 …